自动化学院飞行机器人研究成果被IEEE Spectrum报道
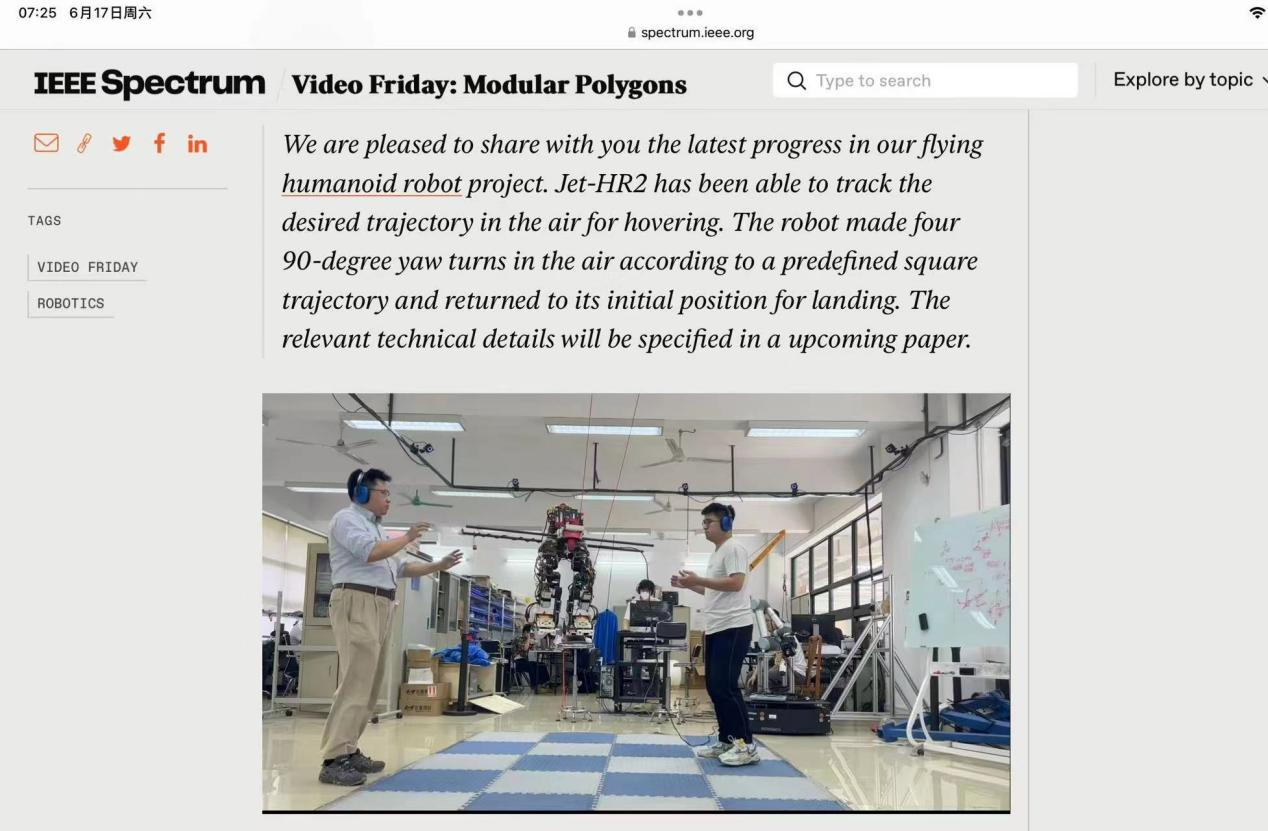
近日,国际著名机器人新闻网站IEEE Spectrum Video Friday栏目报道了自动化学院章云教授所带领的智能检测与控制研究团队黄之峰小组在飞行仿人机器人项目上最新突破。该团队提出了一种全新的推力矢量混合控制框架,成功实现了飞行仿人机器人Jet-HR2在空中实现轨迹跟踪和自主降落。视频展示了该机器人在空中进行四边形轨迹的跟踪效果。机器人在空中成功完成了四次90度的偏航转向,并最终自主降落到起飞位置。
相关发表论文:
Yuhang Li, Yuhao Zhou, Junbing Huang, Zijun Wang, Shunjie Zhu, Kairong Wu, Li Zheng, Jiajin Luo, Rui Cao, Yun Zhang & Zhifeng Huang*, "Jet-HR2: A Flying Bipedal Robot Based on Thrust Vector Control," in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4590-4597, April 2022, doi:10.1109/LRA.2022.3152231.
实验室背景:
实验室成立于2016年,隶属广东工业大学自动化学院章云教授带领的智能检测与控制研究团队,以发展先端仿人机器人技术,探索类人动态行为机理及工程实现作为首要目标,主要研究方向包括仿人机器人机构设计及控制理论,移动机械臂应用。
实验室2017所发布的世界首台基于涵道推进系统的大尺度越障双足机器人,获得美国IEEE Spectrum、广州日报、中国日报等多家媒体的报道。截至2021年1月,机器人原理样机实现超过自身腿长147%的越障距离,是目前世界的最高记录。2021年12月,实验室又开发了世界上首台具备飞行悬停能力的仿人机器人Jet-HR2。该机器人被 IEEE Spectrum 专题报道,相关成果发表在机器人领域著名期刊 IEEE Robotics and Automation Letters 。